Flexible robotic manipulators have many advantages compared to conventional rigid manipulators, such as inherent safety guarantees from compliance, and greater weight and cost efficiency when compared to the more conventional rigid robot. Despite these potential benefits, the implementation of flexible robotic systems has been held back by the fact that their dynamics are highly nonlinear and uncertain, which poses a challenge to the modeling and control of these systems. Most model-based control approaches for flexible robotic systems make use of models with unrealistic assumptions, such as small strains or quasi-static motion, which makes ascertaining robust guarantees of stability difficult. Model-free learning approaches, such as reinforcement learning, have been used to overcome the need of a dynamic model, but this approach still makes it difficult to provide guarantees of robust stability especially when situations outside of the training set are encountered. Input-output stability theory can be utilized to design robustly stabilizing controllers without the need of a system model. It instead relies on knowledge of a system’s input-output properties (e.g., passivity), which are often robust to large variations in system parameters (e.g., inertia, damping).
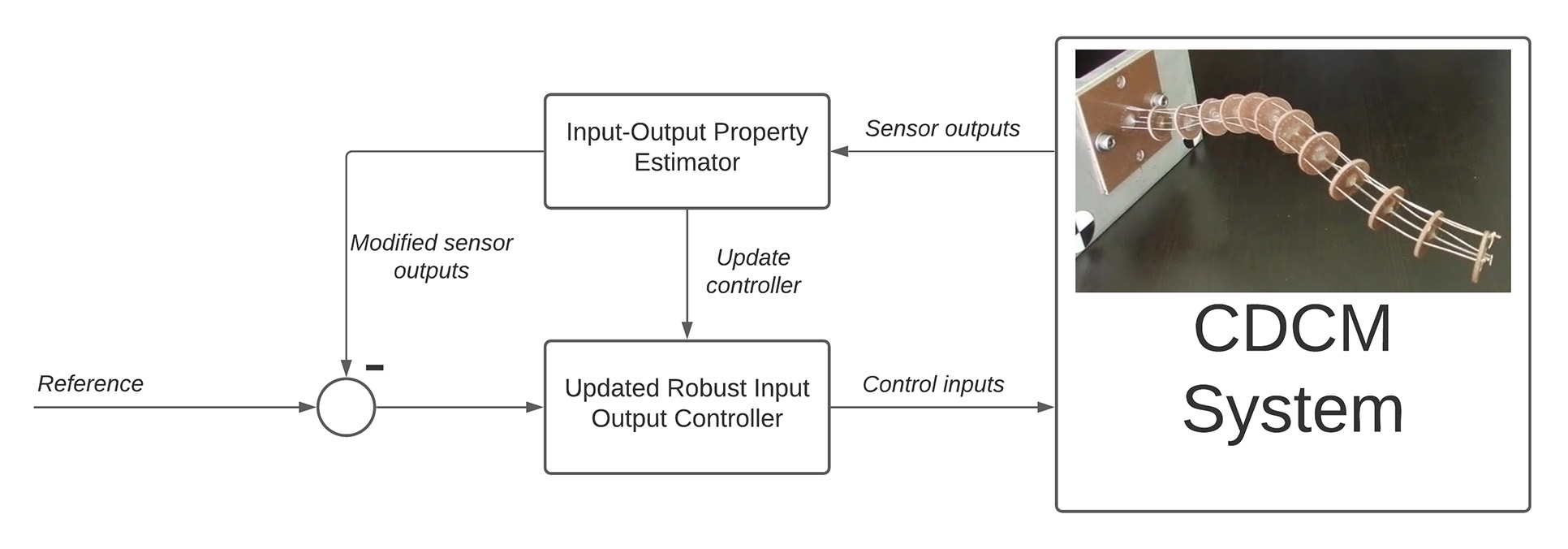
PhD student Vinh Nguyen (Aerospace Engineering and Mechanics), in a project called “Data-Driven Robust Control of Flexible Cable-Driven Continuum Manipulators,” is developing a robustly stabilizing controller for a flexible cable driven continuum manipulator (CDCM) utilizing a data-driven approach. The project will make use of recent developments in the identification of input-output properties from data to develop model-free CDCM controllers that provide robust guarantees of closed-loop stability and performance.
Some funding for this project was provided by a 2022 University of Minnesota Informatics Institute MnDRIVE PhD Graduate Assistantship. The UMII MnDRIVE Graduate Assistantship program supports U of M PhD candidates pursuing research at the intersection of informatics and any of the five MnDRIVE areas:
- Robotics, Sensors and Advanced Manufacturing
- Global Food Ventures
- Advancing Industry, Conserving Our Environment
- Discoveries and Treatments for Brain Conditions
- Cancer Clinical Trials
This project is part of the Robotics, Sensors and Advanced Manufacturing MnDRIVE area.
Research Computing partners:
- University of Minnesota Informatics Institute
Complete list of 2022 UMII MnDRIVE PhD Graduate Assistantships.